Rhythm Robot rev 1 prototype
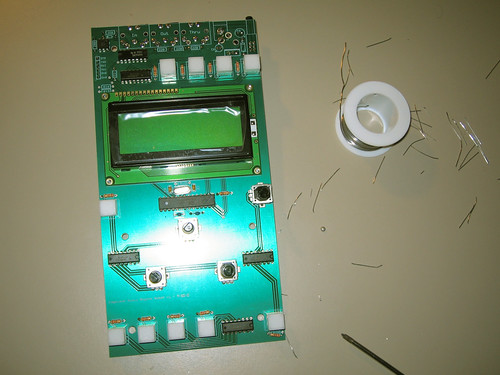
I’ve just finished assembling the first revision-1 Rhythm Robot board. Where the previous prototype was a carefully hand-wired assembly of four perfboards, this is a single machine-printed circuit board. I’ve also eliminated a couple dozen passive components. Assembly to this point took an hour and a half.

Thats a really cool bit of work Mars! What did you use to design the board?
Comment by Wardy — September 18, 2010 @ 9:52 am
I did the work in ExpressPCB. I don’t like the fact that it’s a proprietary system tied to a single manufacturing house, so I tried Eagle, KiCad, and Osmond; but of those KiCad is the only one that is truly free, and it is ugly and complicated. Eagle is OK but the free version has some significant limitations, and while it is less ugly than KiCad it is clearly cut from the same design cloth. Osmond is decent but full of bugs. In the end, the proprietary nature of ExpressPCB’s business doesn’t really hurt; their manufacturing rates are as good as anyone else’s, and they will sell you standard Gerber files if you want to do a big production run somewhere else. The integration also means you get realtime quotes and you don’t have to worry about any mismatch between your design files and the manufacturer’s design rules.
There are certainly some simplifications I’d make if I were in charge of their software design, and I wouldn’t recommend ExpressPCB to someone who does this for a living, but as a newbie it’s proven to be a good choice so far.
Comment by Mars Saxman — September 18, 2010 @ 10:09 am
Thank you for the detailed reply. Seems there isn’t really an easy to use decent piece of software out there for home users at the moment.
Comment by Wardy — September 21, 2010 @ 2:13 am